Hi, I’m still here, just don’t have time to answer everyday.
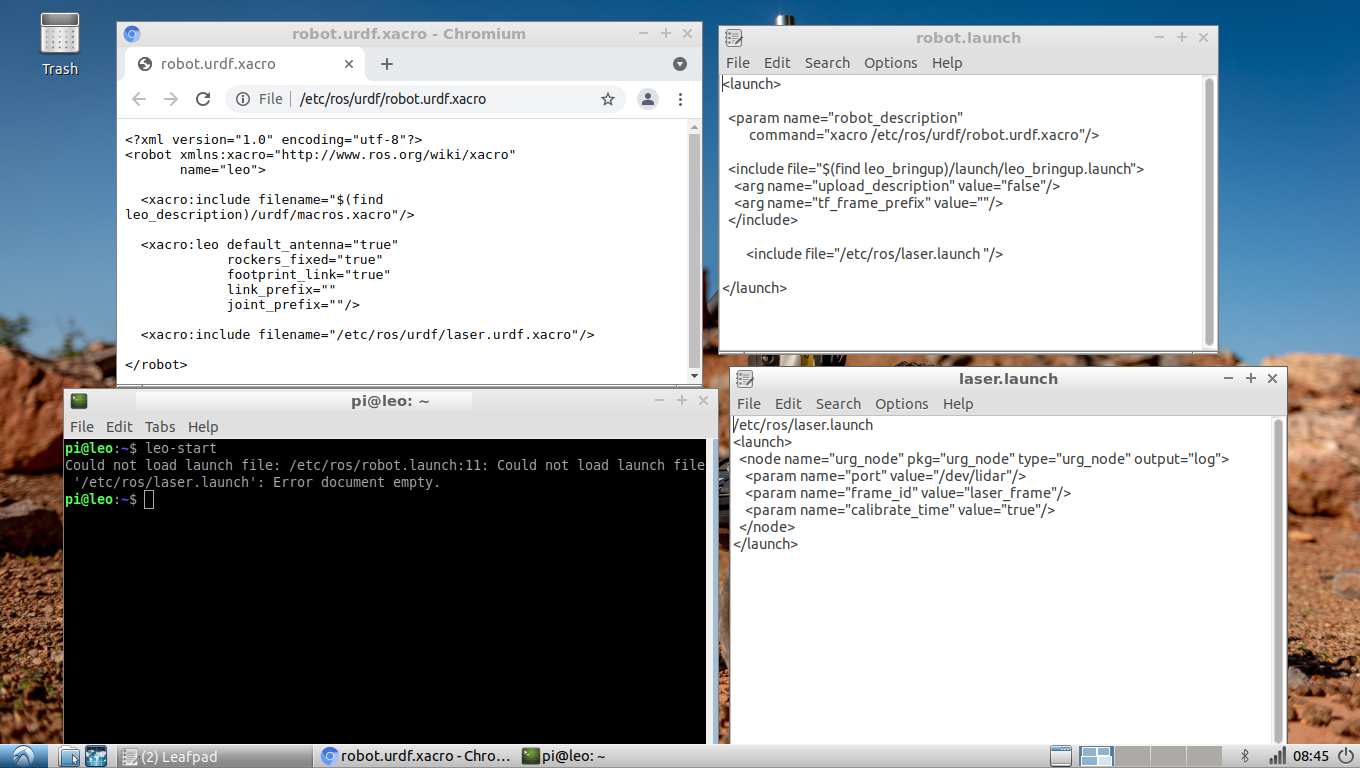
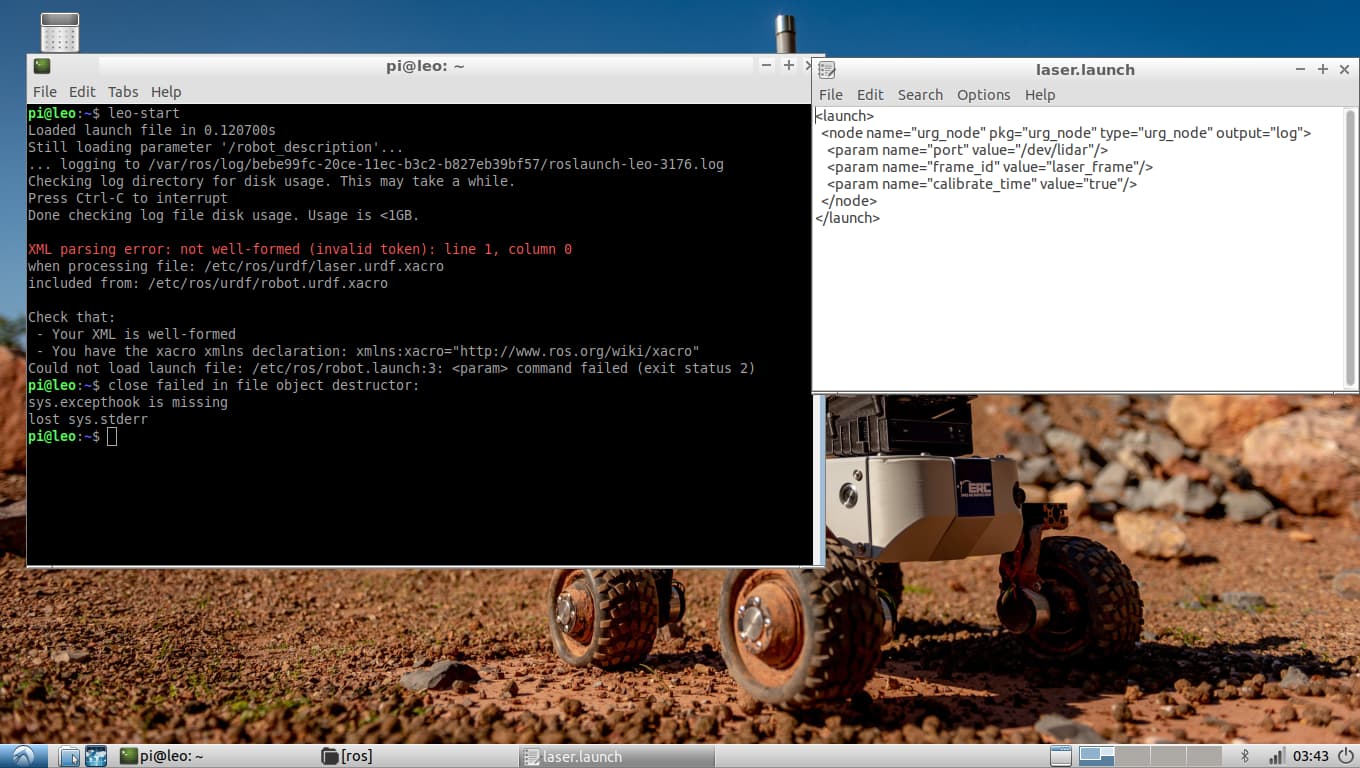
The launch files seem to contain XML syntax errors.
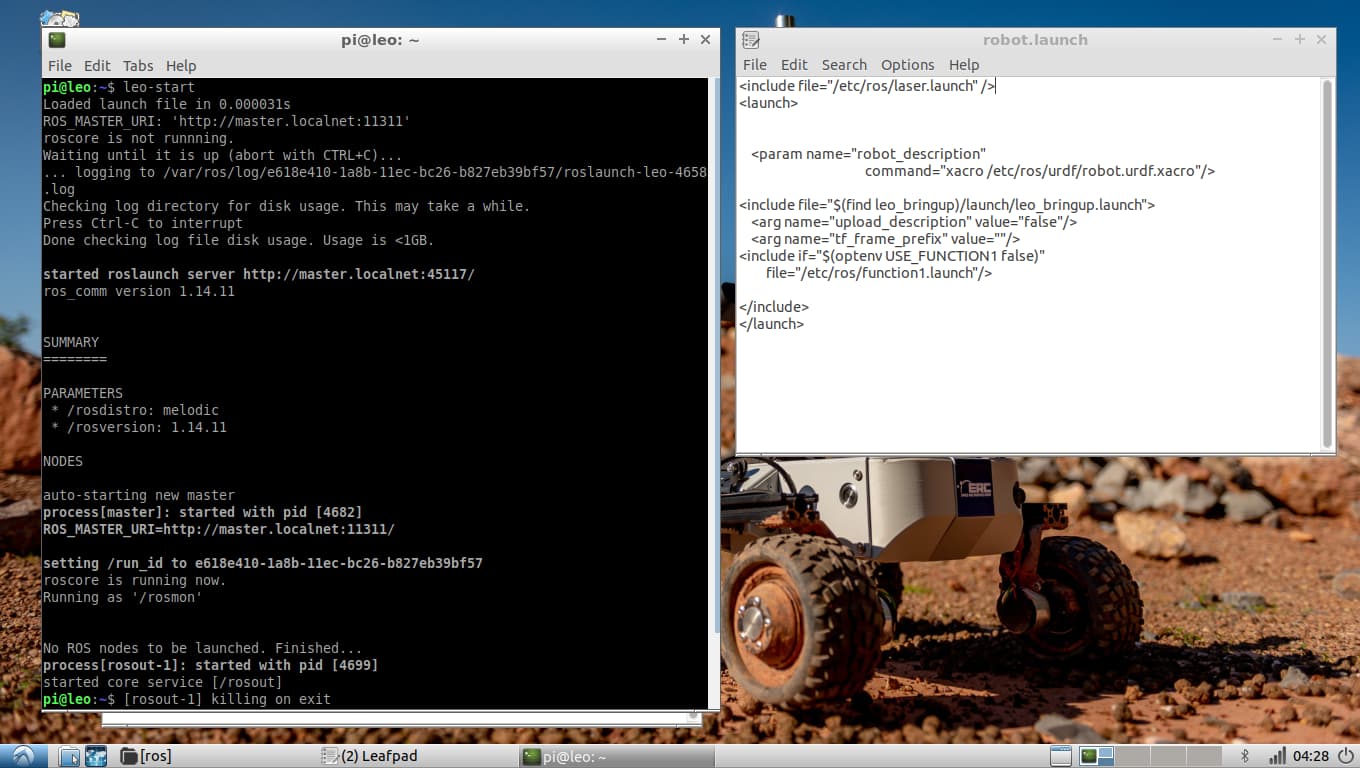
The robot.launch should look like this:
<launch>
<param name="robot_description"
command="xacro /etc/ros/urdf/robot.urdf.xacro"/>
<include file="$(find leo_bringup)/launch/leo_bringup.launch">
<arg name="upload_description" value="false"/>
<arg name="tf_frame_prefix" value=""/>
</include>
<include file="/etc/ros/laser.launch"/>
</launch>
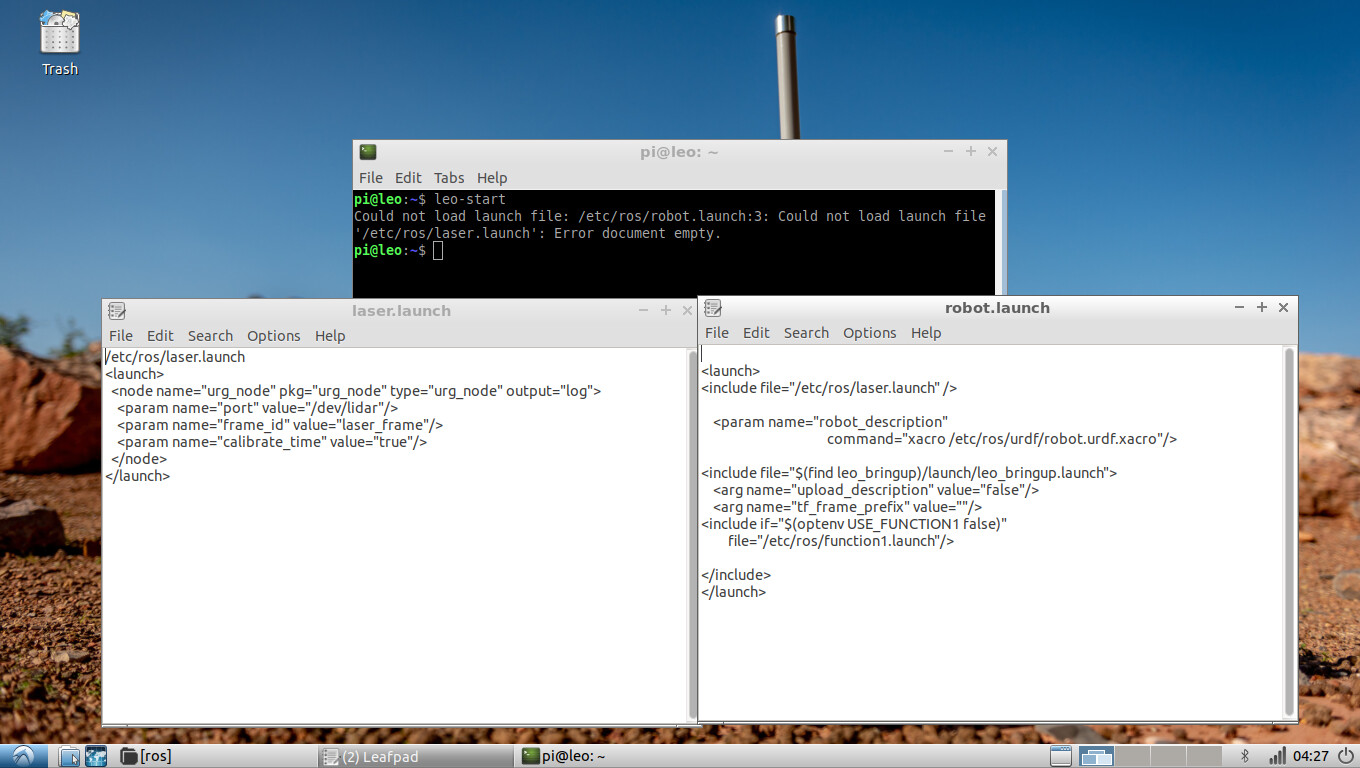
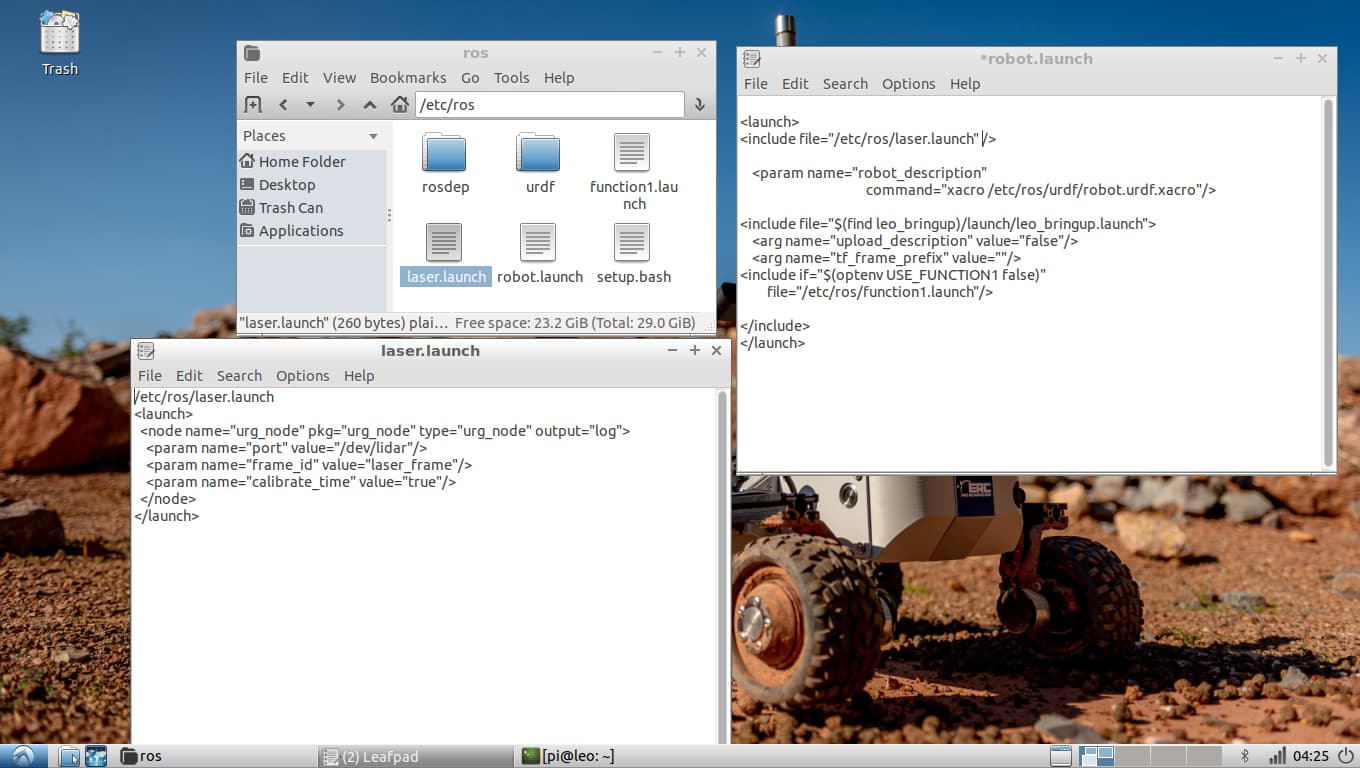
And the laser.launch file should look like this:
<launch>
<node name="urg_node" pkg="urg_node" type="urg_node" output="log">
<param name="port" value="/dev/lidar"/>
<param name="frame_id" value="laser_frame"/>
<param name="calibrate_time" value="true"/>
</node>
</launch>
The first line from the laser.launch in the documentation is just an error from importing the old documentation. (we’ll fix it soon)
Also, you need to add the /etc/ros/urdf/laser.urdf.xacro:
<?xml version="1.0"?>
<robot>
<link name="hokuyo_link">
<visual>
<origin xyz="0 0 0.003"/>
<geometry>
<box size="0.079 0.05 0.006"/>
</geometry>
<material name="support">
<color rgba="0.5 0.5 0.5 1.0"/>
</material>
</visual>
<visual>
<origin xyz="0 0 0.041"/>
<geometry>
<box size="0.05 0.05 0.07"/>
</geometry>
<material name="lidar">
<color rgba="1.0 0.0 0.0 0.7"/>
</material>
</visual>
<collision>
<origin xyz="0 0 0.003"/>
<geometry>
<box size="0.079 0.05 0.006"/>
</geometry>
</collision>
<collision>
<origin xyz="0 0 0.041"/>
<geometry>
<box size="0.05 0.05 0.07"/>
</geometry>
</collision>
</link>
<joint name="hokuyo_joint" type="fixed">
<origin xyz="0.0775 0 0"/>
<parent link="base_link"/>
<child link="hokuyo_link"/>
</joint>
<link name="laser_frame"/>
<joint name="laser_joint" type="fixed">
<origin xyz="0 0 0.064"/>
<parent link="hokuyo_link"/>
<child link="laser_frame"/>
</joint>
</robot>
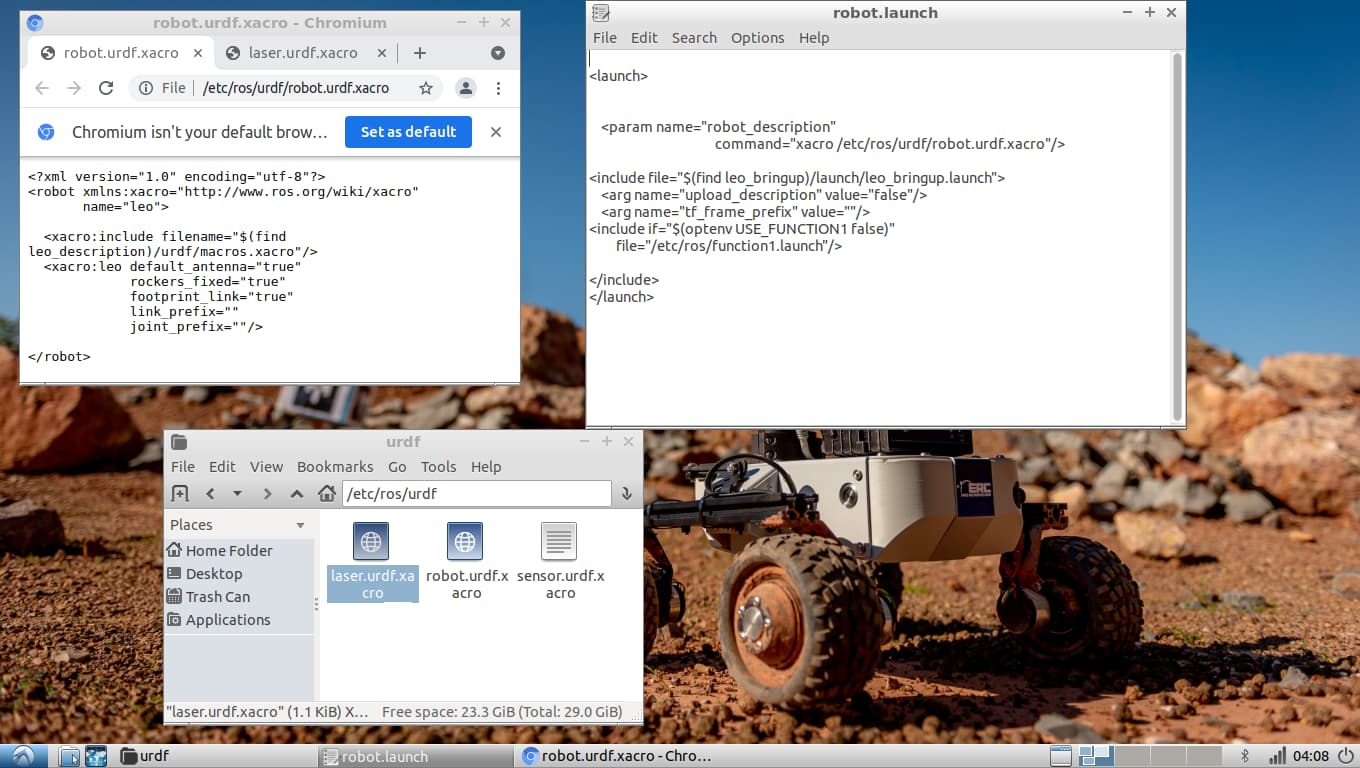
And the /etc/ros/urdf/robot.urdf.xacro should look like this:
<?xml version="1.0" encoding="utf-8"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro"
name="leo">
<xacro:include filename="$(find leo_description)/urdf/macros.xacro"/>
<xacro:leo default_antenna="true"
rockers_fixed="true"
footprint_link="true"
link_prefix=""
joint_prefix=""/>
<xacro:include filename="/etc/ros/urdf/laser.urdf.xacro"/>
</robot>