In your instruction , this section :
Building Leo firmware
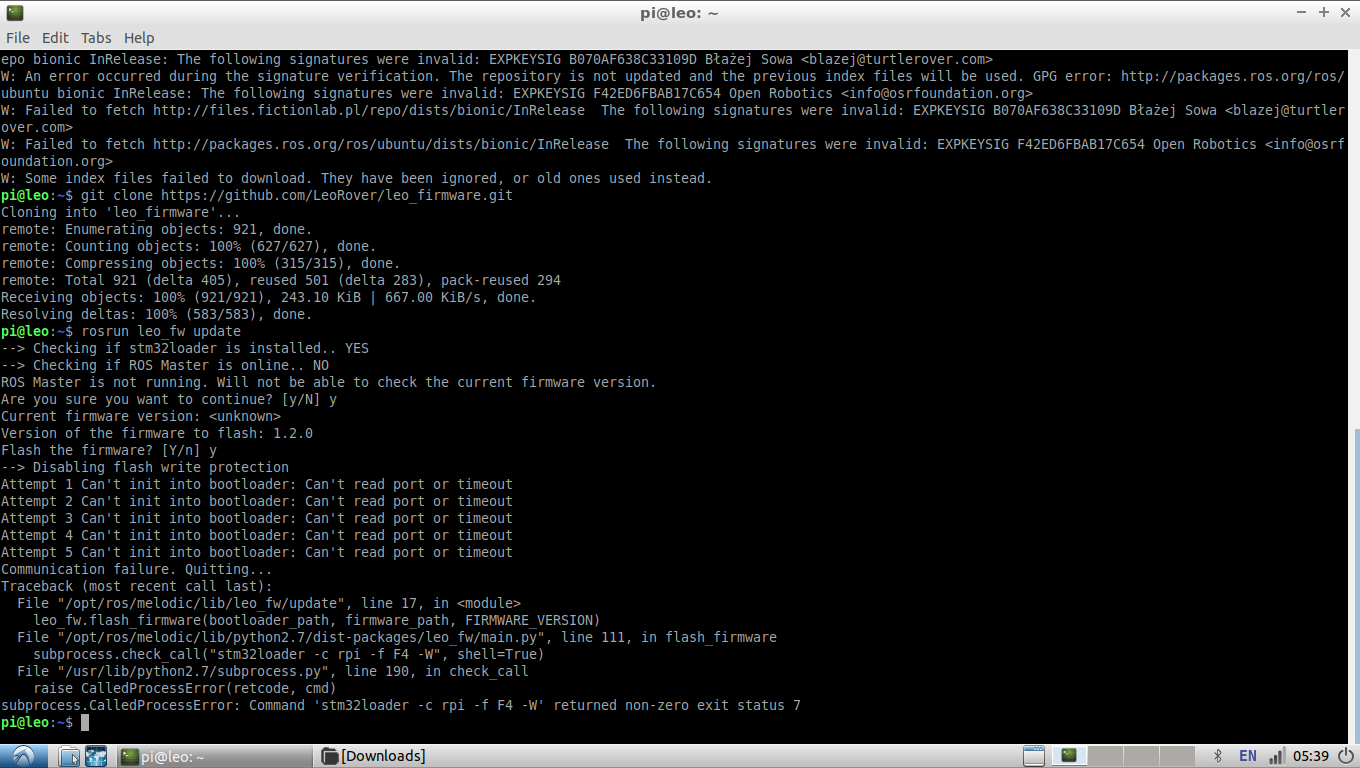
First, you need to clone the leo_firmware repository. If you use the command line, type:
git clone https://github.com/LeoRover/leo_firmware.git
You can also use one of Git GUI clients instead of the command line.
If you don’t want to use Git, you can just download the firmware as a ZIP file and extract it somewhere. However, consider that by using Git, it may be easier to merge new changes from repository later on.
Now you need to open the project in Visual Studio Code. Start VS Code, click on File -> Open Folder or type Ctrl+Shift+P, type Open Folder and click enter. Select the leo_firmware folder.
To build it, just type Ctrl+Shift+B.
If the build was successful, leo_firmware.hex file should appear. If the build failed, a terminal should appear with the error message.
After follow your instruction , in Visual Studio Code, we see " Select the build task to run " . Please tell us which file need to build in folder LEO_FIRMWARE . We can not see leo_firmware.hex or error message .