
Have a strange question here. In one of the photos showing the electronics box, why the Core2-ROS board is rotated so much? I mean, if should fit straight and almost touch the rear wall of the box.
Can you check if the bottom connector of Core2-ROS i properly connected to RaspberryPi GPIOs?
. Please have a look to picture.It’s not correct because I take out Core 2 to electronic box and fixed firmly in flat surface , as Mr.Blazej Sowa required disconnect all motors cables ,take out box due to hard to fit inside
Please remember you already reminded me in the first time when I assemblied LeoRover and I follow exactly .
If Core2 ROS board rotated so much , it was not power from GPIO of Raspberry and LED not lit .
This box design need to improve again. So please don’t mention about mechanical parts.
What we need at this moment is Leo software for Core 2 . Let 's Mr. Blazej Sowa continue to instruct for us. Thank you.

Please remember you already reminded me in the first time when I assemblied LeoRover and I follow exactly .
If Core2 ROS board rotated so much , it was not power from GPIO of Raspberry and LED not lit .
This box design need to improve again. So please don’t mention about mechanical parts.
What we need at this moment is Leo software for Core 2 . Let 's Mr. Blazej Sowa continue to instruct for us. Thank you.
Sorry for the late reply again, just got back from vacation.
It seems that the flashing scripts can’t even properly communicate with the bootloader on the STM32 chip. I won’t be able to properly diagnose the problem without having the board in my hands, but the things that come to my mind the most are: a hardware issue with the STM32 chip on the CORE2 board or some broken connections between the STM chip and RPi.
I think the easiest way to resolve it would be to send you another CORE2 board, preflashed with the newest firmware and checked by us. @Szymon what do you think?
Yep, let’s do it.
;]
Oh ! I am happy to known that you come back after long time .
Hope you had a excellent vacation with your friend and family.
I also welcome to another Core2 board but Mr.Szymon also sent to me new Core2 board in the past. The trouble issued from old Core2 board so it’s resolved by replace this new Core2 board. What I need may be only SD card pre-installed and flashed Leo newest firmware checked from you,if possible.With this SD card , I can boot to my LeoRover ready to run and study later.
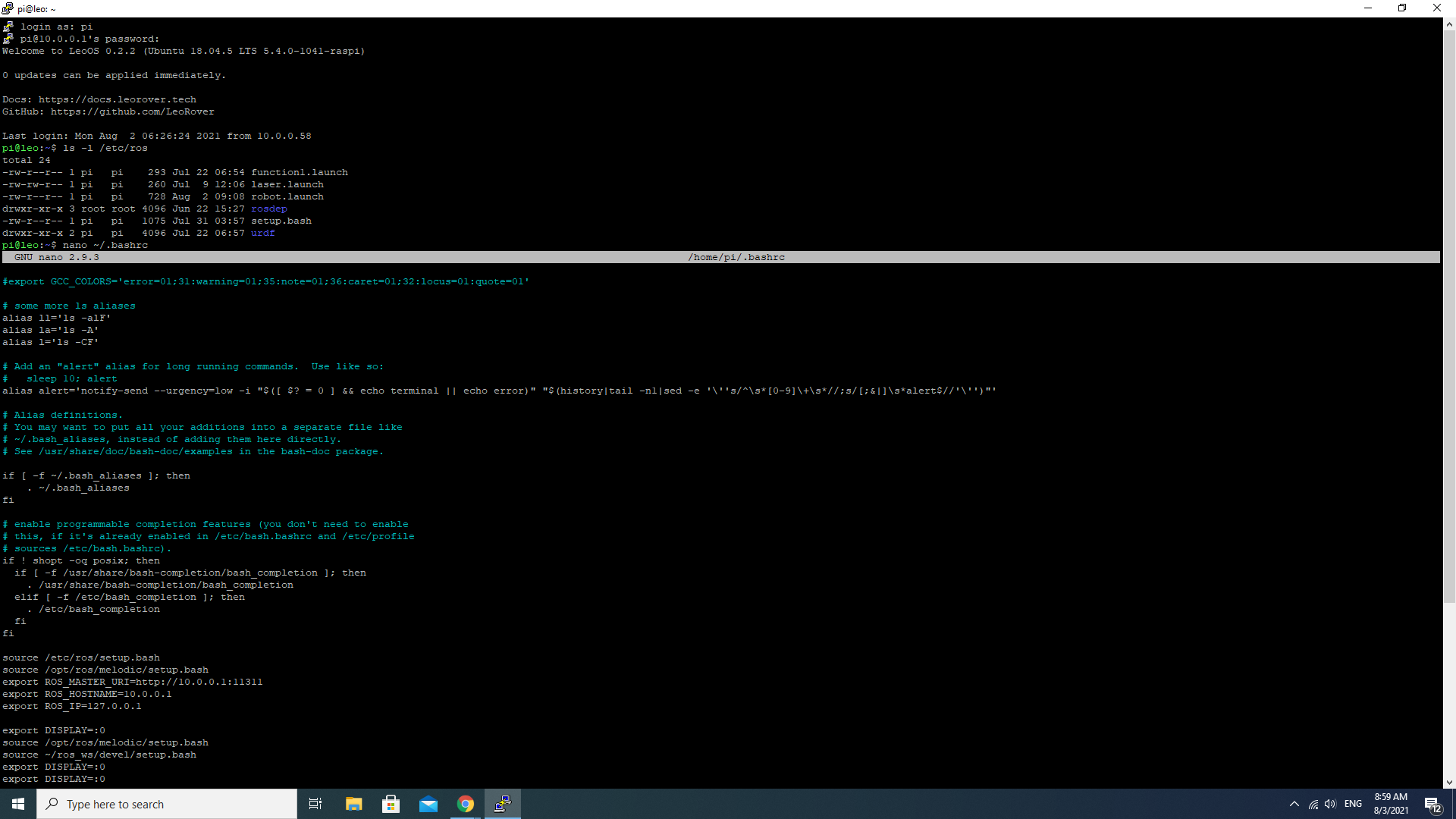
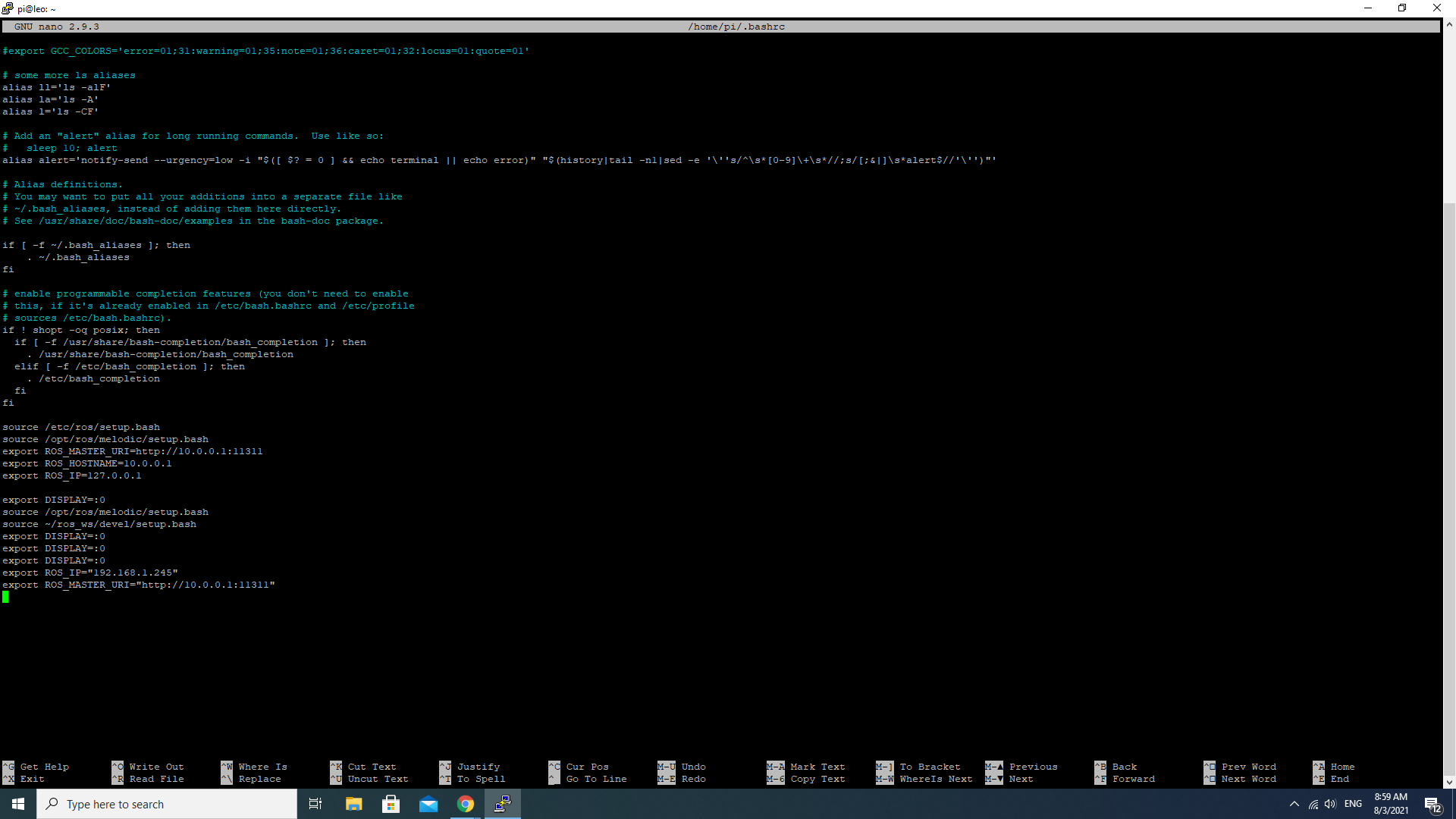
My current problem is my computer and LeoRover can not identified each other althought I followed ROS Network Setup instruction and try so many times.
I follow to your request and attach output display result as under :
Finally ,I’ve really highly appreciate to your support ,following my trouble to the end. If success, I make sure that I will expand Leo products with our project into Viet nam market through our company in cooperation for getting profit to both companies.
Please accept my sincere gratitude with your kind support .
The first Core2-ROS you got had faulty power converter as I remember, in this one there’s a strange hardware-based issue, I don’t really know why.
Sending you a microSD card won’t help as the issue is in the board itself rather than in the software. I’ll preapre the board for you and will ship asap. Sorry for the trouble.
OK, you can send that board to under following address : To: bots - don’t feed on that!
We will pay freight in our FedEx account.
Looking for your board ship asap.
Thank you a lot.
1 Like
Sure. I edited your message not to show the address, russian bots love such info to feed on 
Dear Mr.Szymon,
We just received your new Core2 board in today .But we can not find any SD microcard with pre-installed Leo Rover software. Please give me your recommendation.
Thank you very much .
We flashed the newest firmware to the core2 board we sent you. The SD card seemed to be working on your side, but to eliminate any problems with the image you are using, make sure to flash a clean LeoOS to your SD card. Then, put the SD card to Raspberry Pi, connect the Core2 board and turn on the robot.
After connecting to the Rover, log in via SSH, and check the output of:
rostopic list
If the Raspberry Pi successfully connected to the Core2 board, you should see new topics (for example, /wheel_odom) and you should be to send velocity commands via the WebUI.
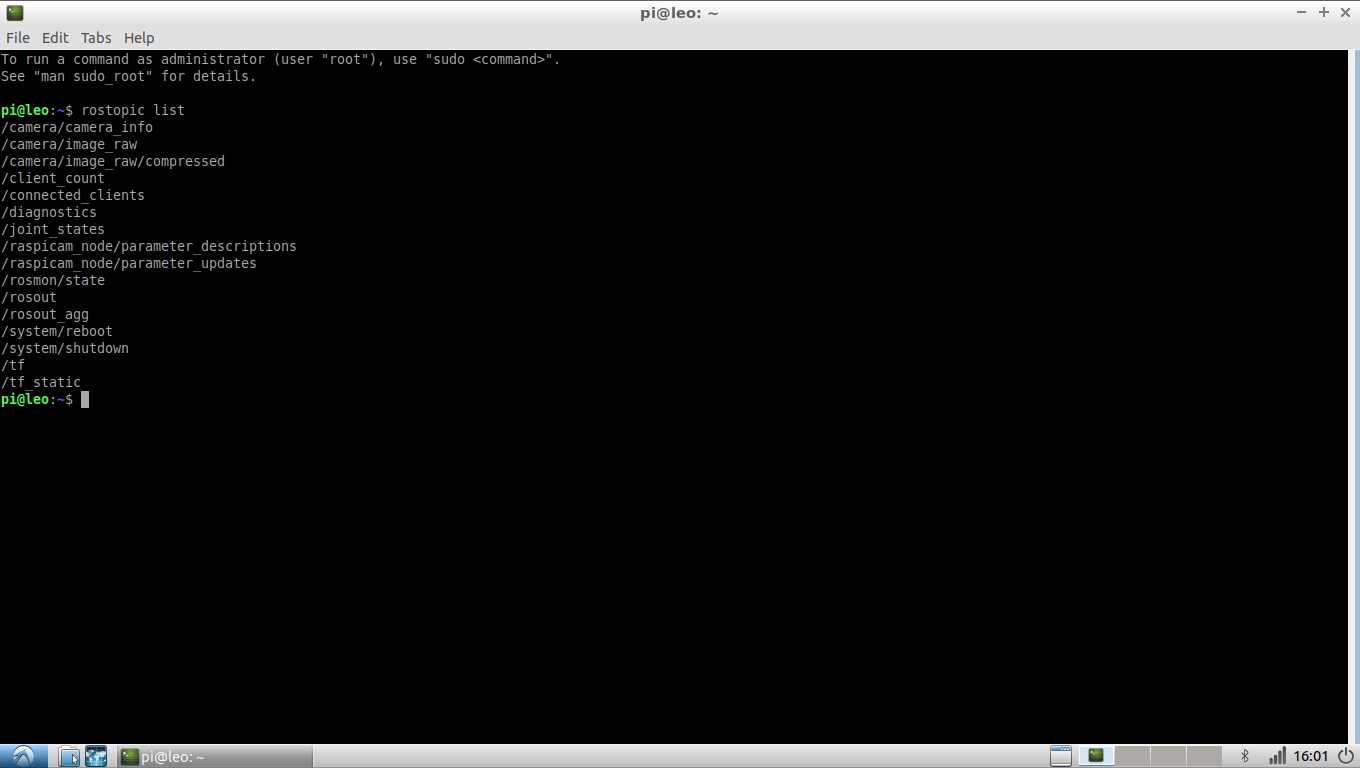
I followed your instruct and get output as above display.
Please tell me what I should do in next step . Please kindly advise to avoid mistake again.Thank you.
Reason I asked this question because I will not repeat again basic procedure , means that no need make command : core2-flasher bootloader_1_0_0_core2.hex ; leo_fw update,leofirmware …
Just adding leo_navigation and leo_viz package ,slam,lidar sensor …But it seems troubles still not resolve.
It seems you don’t have wheel odometry listed in rostopic list. Which means it still doesn’t work.
How do you burn your software image to the microSD card? Do you use Etcher as described here? Leo Rover Developer Guides - Software update
No, you did not understood my idea. I am not new customer of LeoRover but from 01 year ago .
The problem issued from images that we are using in follow your instruction in LeoRover website.
If we flashed by a clean LeoOS to our SD card ,everything are OK as instruct by Mr.Blazej Sowa, but when we added other features ,problem happen.
What I means is that your instruction through your website were not logical and confuse to your customers ( I also read some comments from customers with another topics ,it seems they confused)
Our suggestion is that you should re-arrange your topics in website as following : 1) Which parts of software used for computer ? 2) Which parts of software used for LeoRover ? 3) How to connect computer vs LeoRover for control it ? By joystick, by webUI ,…That’s all .It is not neccessary to show too long content in some topics. If you want to hear me in detail ,please try contact by email. Thank you.
Hi, Mr.Blazej Sowa,
We followed to this instruction ,make sure clean LeoOS in our SD card to LeoRover by using Etcher ( https://github.com/LeoRover/LeoOS/releases/download/0.2.2/LeoOS-0.2.2-2021-06-22-full.img.xzr)
We were able to use WEB UI in browser : 10.0.0.1 and see camera and DC motors of wheel work in LeoRover ( only 02 wheels in position behind A,C running, 02 remained wheel in front B,D no works) .
But after proceed next steps for adding some features as your instruction on website. LeoRover not works again. Mistake issued from files : robot.launch and setup.bash .Please advise for us how to modify correctly these files.Thank you.
Dear Mr.Szymon,
Hi, good day.It was long time you did not reply my questions .It seems you give up in reply.No problem.
I appreciated highly you improved your website by re-arranging some items and removed unnecessary information .But still not perfect when you missed item : Firmware development in update files of Husarion Core 2 , please re-update for your another customers follow it. This is important because miss it, DC motors did not running.Thank you.
So if I understand correctly, you are able to drive the rover on a clean OS but only 2 rear wheels are actually moving. And when you try to add some features it stops working.
I would start by trying to figure out why the front wheels are not moving, because it seems like a wiring issue.
Regarding the second issue, there is probably some typo in the configuration files you modified. Please paste here the contents of these files:
/etc/ros/setup.bash
/etc/ros/robot.launch
/etc/ros/urdf/robot.urdf.xacro
/var/ros/log/rosmon.log
Hi,
I just check again only 02 wheels running and 02 wheels no work , find out not enough power in battery .Replace with other strong battery, 04 wheels running in good : battery 12VDC 8000mAh better than 12VDC 5000mAh for this rover.This problem done.
I am going to test the second issue and find out it seems the position of command in content of file /etc/ros/robot.launch so important .I continue to try many ways and report to you later.Thank you.
I have a question - which type (motor) do you use?

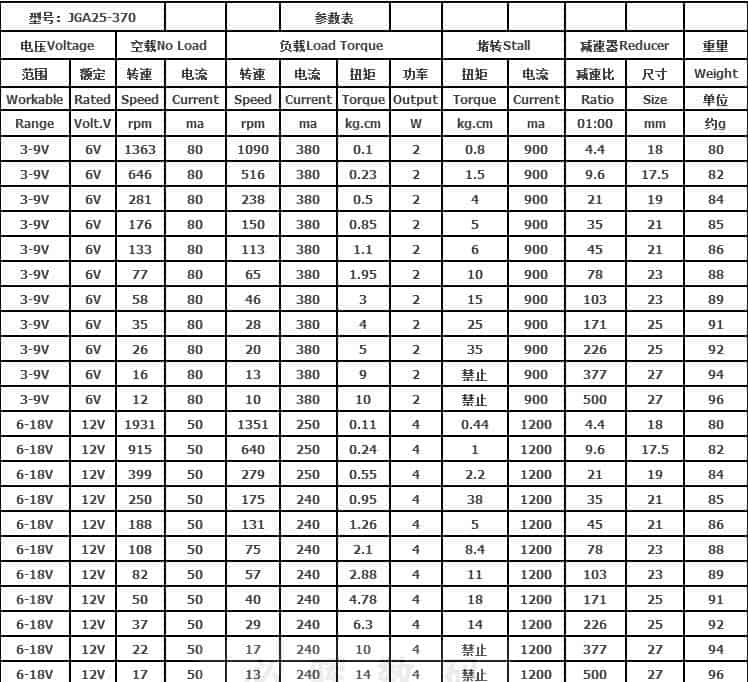
Please take a look to picture and datasheet of my DC motors
I used this DC motor with gear & encoder model JGA25-370 (12VDC) ; current 50mA, same to Leo motors (Pololu or Bueler) , it’s no overload for Core2-Husarion Board and so strong with load ,running faster than Leo motors. I also studied carefully specifications so no problem.
I recommend Leo should use strong battery more than existing battery because consumption more device on it ( DC motors, Lidar laser sensors, USB wifi … ) , hope my recommendation will be helpful
Thank you.