The Husarion team no longer supports hFramework but our firmware is written with this framework and we don’t have any plans to port it to Mbed for now, as it works for us.
I just tested building it on Linux and on Windows and didn’t have any problems.
Please try to follow these steps again:
- Make sure you have the Husarion extension and C/C++ extension enabled on your VSCode. Disable any other extensions that might be in conflict.
- Make the clean clone of the leo_firmware repository:
git clone https://github.com/LeoRover/leo_firmware.git - Click on
File -> Open Folderand select the newly clone firmware code.
After this, you should see new files being created, in particular the .vscode directory with build tasks definition. Let me know if something actually happens.
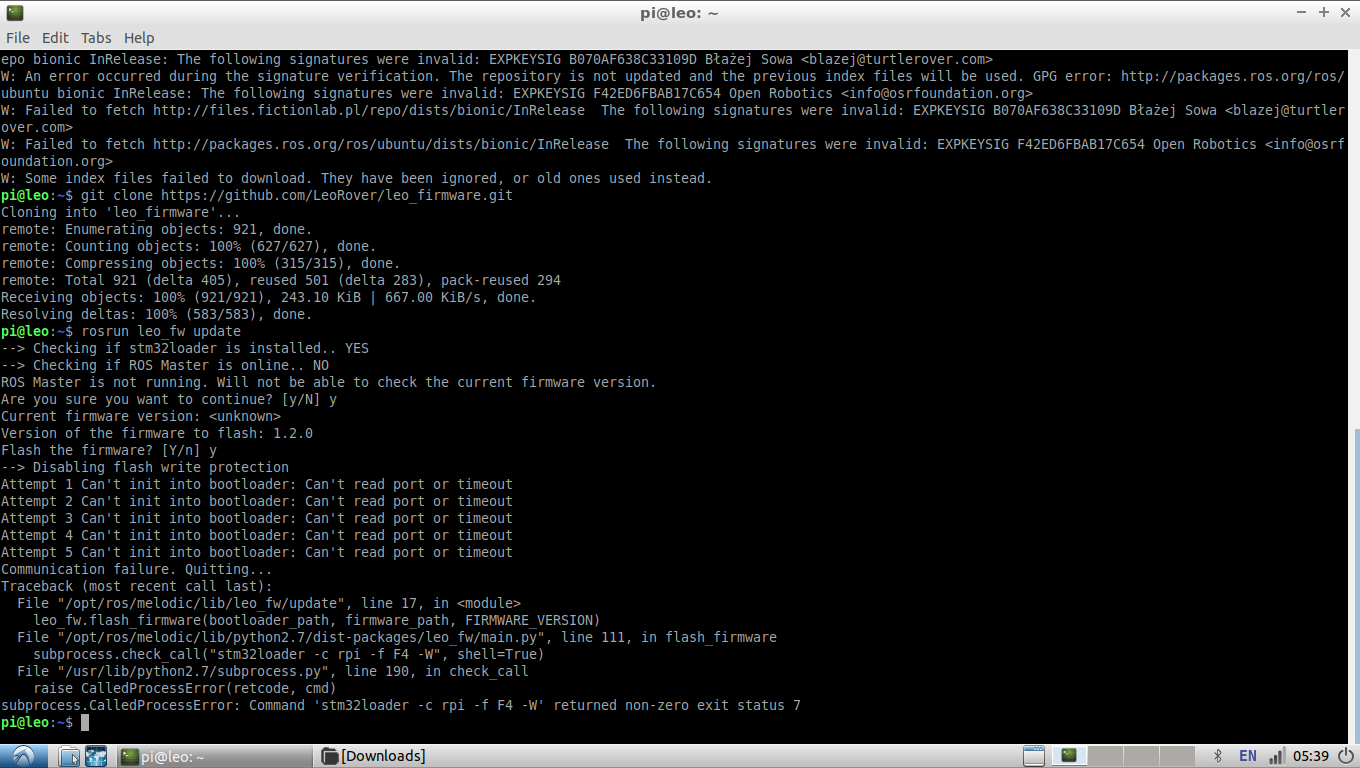
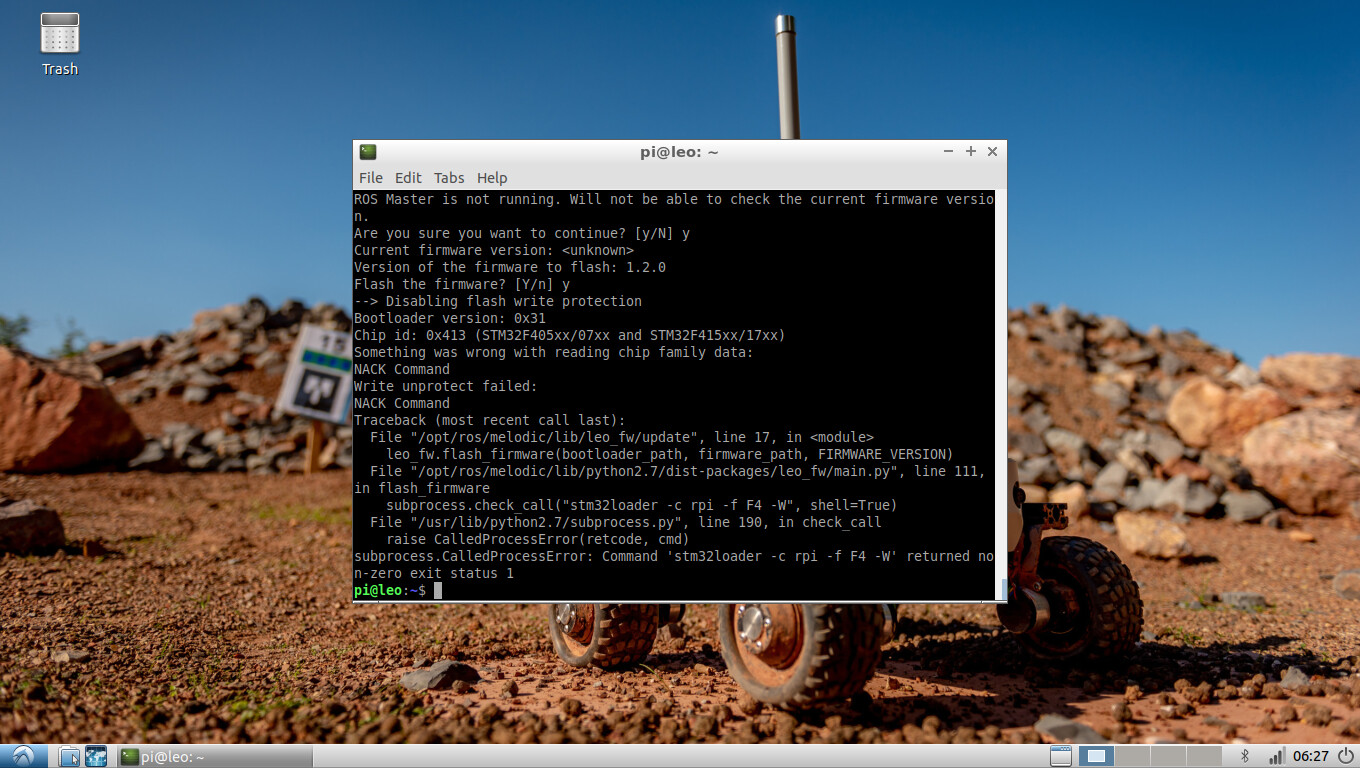
Can I also ask why do you want to build the firmware manually? You can flash the newest binary by typing on the rover:
rosrun leo_fw update