I have the Buehler Motors 1.61.077.414 but somehow they run in reverse when the encoders are reporting them to be running forwards (so in rviz the model is running forwards correctly, but physically the rover is going backwards). A Twist msg with linear.x -1 is making the rover go forwards and vice versa. Any ideas of how I can reverse the the motors so it lines up with the encoders?
Can you check if the encoder contact named M2 is soldered to the motor pin with “+” embossed in the plastic?
Maybe we soldered it wrong in our workshop. Then the easiest would be to switch black and red wires connection (for ex. in the place where you connect motor wires to the rest of harness).
Can you also double check if you have connected the wheels to the correct hMotor ports?
The correct connection is described here.
After soldering the cables on and off a couple of time it just turns out I had accidentally swapped AB with CD (left for right side) on the CORE2-ROS hbridge connection! Cables were all correct just mounted 180 degrees essentially…
Lesson learned I guess. If you take the rover apart double check the connections before you put it back together again.
Thanks guys!
1 Like
Actually now that check the current instructions on my version it looks like it should be connected the other way around. From the picture it looks like A/B is on the left side of the picture (rover right) and C/D is right side (rover left). For me it’s the opposite A/B is rover left and C/D is rover right.
Would it be possible to clarify the instructions for which motor (front left, back left, front right, back right that goes into A/B/C/D there?
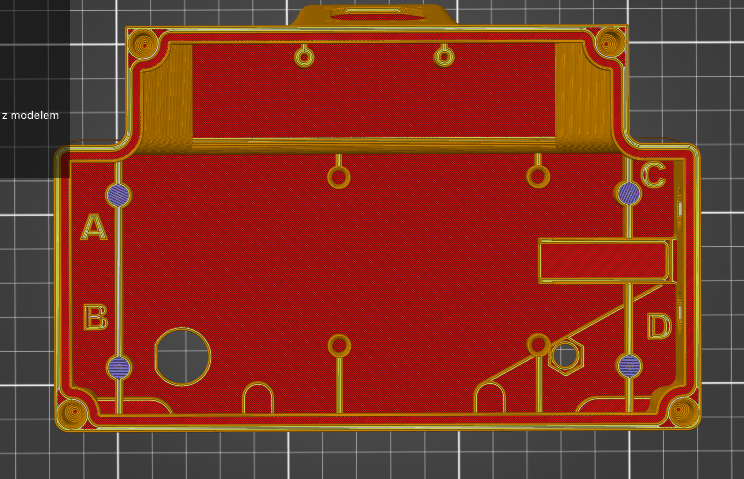
Actually the motor sides and letter symbols are emobosed on the electronics enclosure itself - as in the screenshot. I’ll check for any mistakes in the manual as well, but you can see it as attached (just mind the enclosure will be mounted upside down.