Hi,
I need to install a Jetson Nano on top of our LeoRover to increase the computing power available.
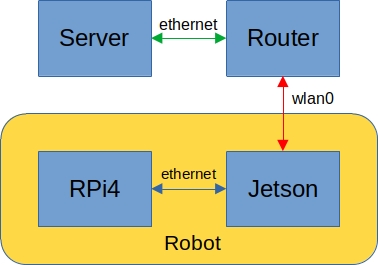
I’d like to connect the Jetson to the RPi4 inside the rover using an ethernet cable. I’d like to keep the current wlan_ext interface intact and use the Jetson wifi as the main AP (because it’s a WiFi-AC card, it’s stronger and faster).
Here a representation of what I think the network setup should be like:
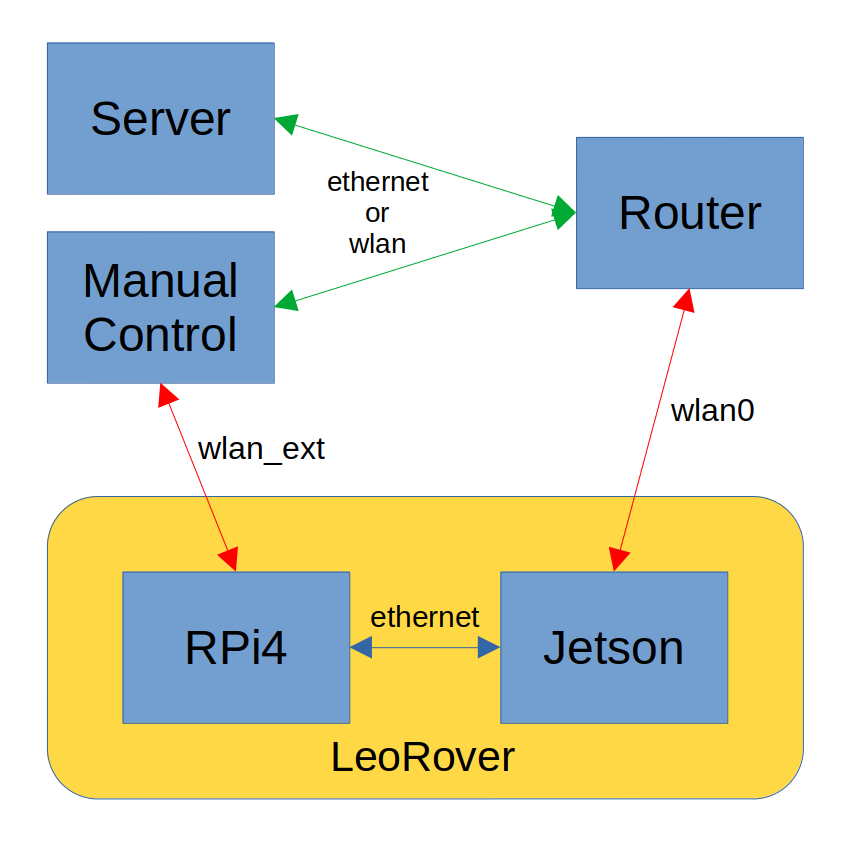
I’d like to be able to ping any computer while connected to any interface.
I think I saw in an other post that you previously made a similar setup. If that’s true, could you please provide some information on how you did it?