Is the /realsense/imu topic the culprit? Should the orientation (x,y,z,w) values be non zero?
rostopic echo /realsense/imu -n 1
header:
seq: 206158
stamp:
secs: 1639426913
nsecs: 52158594
frame_id: "realsense_imu_optical_frame"
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 0.0
orientation_covariance: [-1.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0]
angular_velocity:
x: -0.00523598771542
y: 0.0
z: 0.00349065847695
angular_velocity_covariance: [0.01, 0.0, 0.0, 0.0, 0.01, 0.0, 0.0, 0.0, 0.01]
linear_acceleration:
x: -0.12748645246
y: -9.57129001617
z: 0.411879301071
linear_acceleration_covariance: [0.01, 0.0, 0.0, 0.0, 0.01, 0.0, 0.0, 0.0, 0.01]
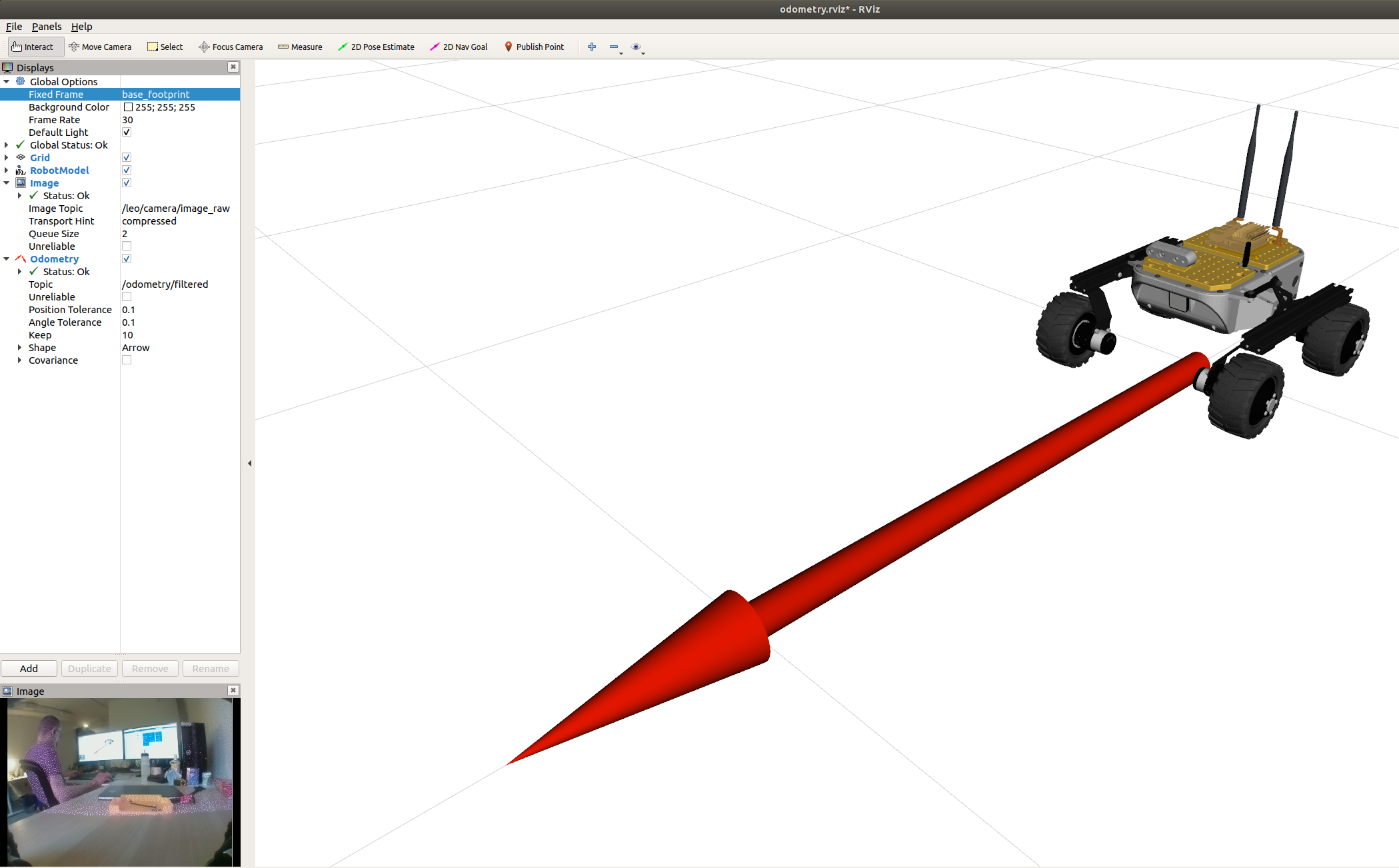
Here’s the /odometry/filtered output:
rostopic echo /odometry/filtered -n 1
header:
seq: 37755
stamp:
secs: 1639427140
nsecs: 904238939
frame_id: "odom"
child_frame_id: "base_footprint"
pose:
pose:
position:
x: -6364.32784359
y: 103755.501175
z: 5.83617535177e-27
orientation:
x: 9.1537298832e-25
y: -1.47592951365e-24
z: 0.0767939226193
w: 0.99704698658
covariance: [428764852728.86066, 32325976071.85244, 3.1913840655349265e-26, 2.996006058650354e-26, -6.064582541336202e-26, -5186692.6546927765, 32325976071.852715, 2567248797.7187767, -5.121594615469847e-25, 6.0241001779795036e-27, -9.397093556241824e-27, -420225.93061737926, 3.191453223209511e-26, -5.121593543865204e-25, 4.991689687959491e-07, 2.2245545426848255e-12, -2.7729352027131484e-18, -4.198211991401605e-30, 3.135476921941272e-26, 6.240210767443945e-27, 2.224554542684826e-12, 4.983416351776781e-07, 7.422336280383743e-21, -2.4898574872641778e-26, -6.064582542101097e-26, -9.39709355742703e-27, -2.772935202713148e-18, 7.422336280382881e-21, 4.983416411325654e-07, 4.8023883472728163e-26, -5186692.654692823, -420225.9306173789, -4.048091872377733e-30, -2.3794139717714324e-26, 4.802388346782371e-26, 75.55521254083116]
twist:
twist:
linear:
x: -1.98606548724e-48
y: 162.219836118
z: 7.57800688388e-24
angular:
x: 8.38601634272e-20
y: -1.61760839308e-19
z: 0.00140477887722
covariance: [0.022257053033048906, -1.2563504552231858e-48, 1.223456571036326e-35, -1.2625008041886102e-37, 1.6565948877342714e-43, 6.4035234384865545e-49, -1.2563504552231855e-48, 31.52616683340289, 4.545388262744821e-26, -9.449622450221385e-35, 1.2646268133179808e-40, 3.2489611790554995e-46, 1.2234565710363263e-35, 4.545388262744821e-26, 4.987541707754389e-07, 1.3266512526455325e-21, -1.6695090369805254e-27, -9.174212044468711e-33, -1.2625008041886098e-37, -9.449622450221385e-35, 1.3266512526455323e-21, 4.950896422862173e-07, 1.8122291235548307e-19, -1.4405279048319616e-19, 1.6565948877342712e-43, 1.2646268133179803e-40, -1.6695090369805257e-27, 1.812229123554831e-19, 4.950896422862175e-07, 2.778685294768137e-19, 6.119464337102886e-49, 3.1048413451485618e-46, -8.76723774678273e-33, -1.3766247227024636e-19, 2.778685294768114e-19, 0.0035786270035043127]
---