
Hi all,
I am following the tutorial on operating Leo with a Joystick and I cannot download the dependencies. I obtain a 404 error for the specific package it tries to download. Manually going to the URL also shows the package does not exist anymore or has been renamed. Here is a screenshot
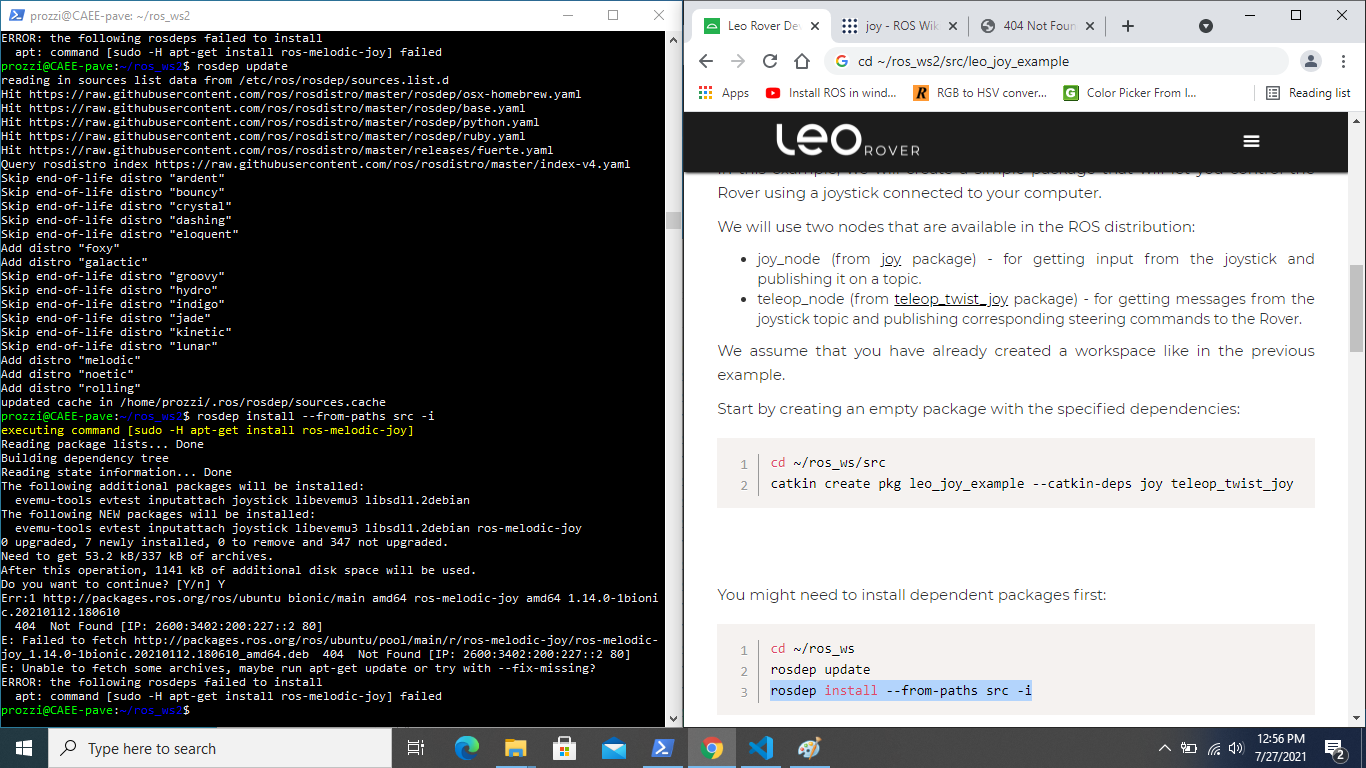
It reads:
E: Failed to fetch http://packages.ros.org/ros/ubuntu/pool/main/r/ros-melodic-joy/ros-melodic-joy_1.14.0-1bionic.20210112.180610_amd64.deb 404 Not Found
but within the URL there are other packages and one of them is an updated date of the one it’s trying to find:
the following package appears:
ros-melodic-joy_1.14.0-1bionic.20210505.032331_amd64.deb
It seems to be the updated version, but the apt-get does not read it and defaults to a file that no longer exists. Any help would be appreciated!!