Sorry for my late reply - much work . I´ve tryed - but no sucsess.
roslaunch leo_navigation odometry.launch three_d:=true (Rover)
roslaunch leo_viz rviz.launch config:=odometry (crappy Laptop)
is that right ?

Sorry for my late reply - much work . I´ve tryed - but no sucsess.
roslaunch leo_navigation odometry.launch three_d:=true (Rover)
roslaunch leo_viz rviz.launch config:=odometry (crappy Laptop)
is that right ?
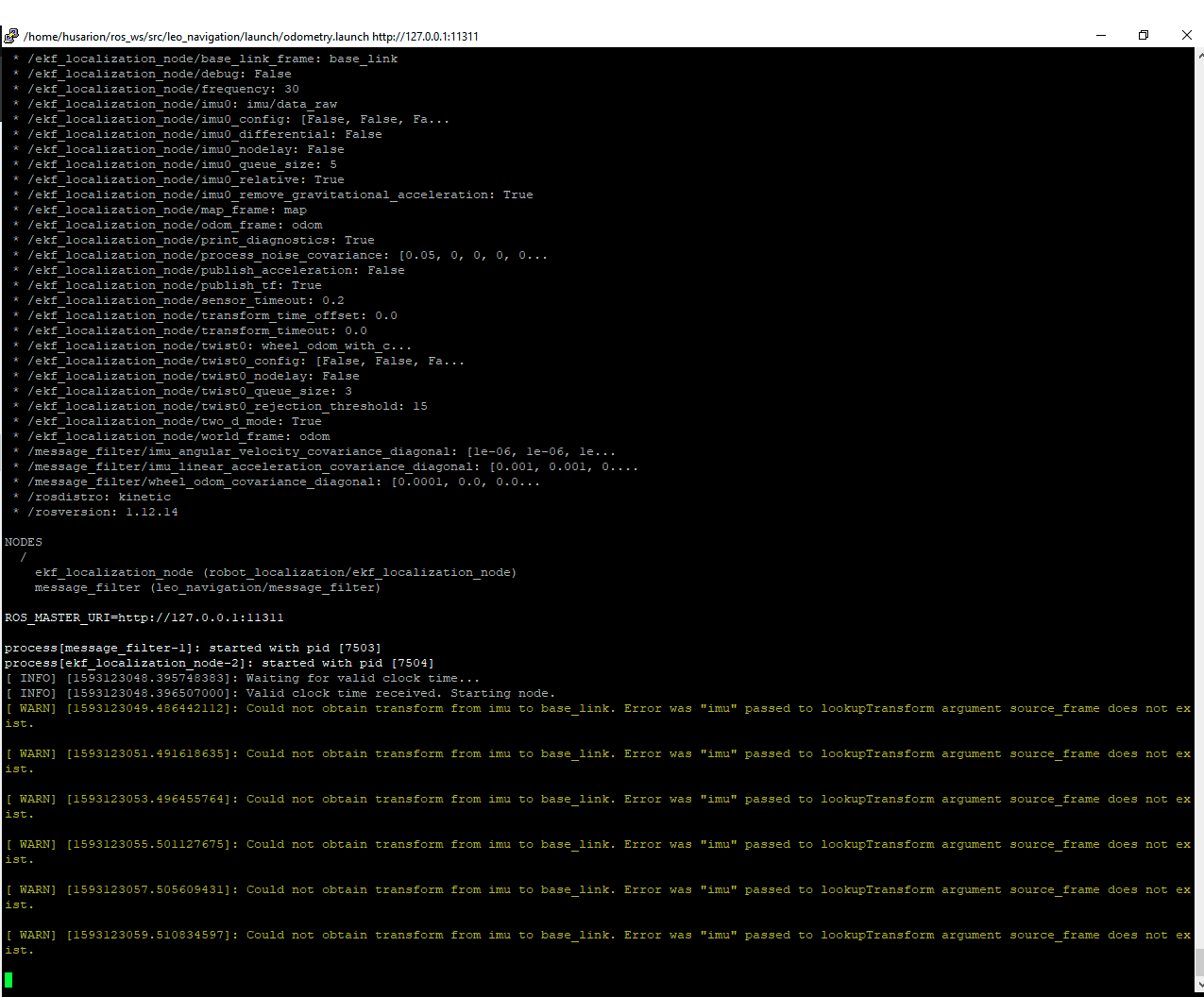
I´ve typed the Lines into the Xacro File and updated everything. But i getz the same Eroor Messages and no Movement in the Pitch and Roll Axis . Error Messageges like the Photo in the prev. Post. One line in the massage Box is new --> First Imu Data received.
Does it matter whitch OS Version is installed on LEO ?. Actually i use the 1.0.0.0 (Kinnetic ?)
What output do you get when you run this command?
rosrun tf tf_monitor base_link imu
Sorry for the late reply. I´ve crashed my SD Card - so i work for now with the new Image (LEO OS Melodic). I have to configure a lot of thinks and then i go back to the IMU Problem . I will post the output soon
pi@leo:~/ros_ws$ rosrun tf tf_monitor base_link imu
Waiting for transform chain to become available between base_link and imu …
Thats the message.
can you shoe your Xacro File . I don´t have a Lidar. I think thats the Problem. And whitch xacro File do you mean (on LEO or Laptop or both) . i´ve found only a Robot.Xacro File.
If you have only IMU integrated, your /etc/ros/urdf/robot.urdf.xacro file on your Rover should look similar to this:
<?xml version="1.0" encoding="utf-8"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro"
name="leo">
<xacro:include filename="$(find leo_description)/urdf/leo.urdf.xacro"/>
<link name="imu"/>
<joint name="imu_joint" type="fixed">
<parent link="base_link"/>
<child link="imu"/>
<origin xyz="0.027 0 -0.07" rpy="0 0 0"/>
</joint>
</robot>
Now it works  . Thank you for your Help. Next Step is to implement the BME680. I will write a Firmware with your sample and then i will show the Results
. Thank you for your Help. Next Step is to implement the BME680. I will write a Firmware with your sample and then i will show the Results
Hey @Django - if you have so many problems with the sensor, maybe it would be easier to move to a USB based sensor that will talk directly to RPi? We’re planning actually to go this direction in the next version of the Rover as implementing new firmware every time is pita.
Sensor Works on Husarion hSense 1. I need the USB Ports for other Stuff :-). It´s easy . The Problem is to make a Topic and puiblish the Data Stream seperatet to the UI like : Temp
= 30 C, … . Thats the Goal. The .hex File is working great. The Husarion Board has so many nice Ports that you must use it . You have made it with the GPS and IMU also RElay Output. So it must be easy to use a port for an another i2c Device like the BME680. This Sensor is Cheap and gives you a lot of nice Basic Informations about the Enviroment. Blazej has make a Sample for me. This Sample is working . Only the ROS Stuff is missing so that you can use the Sensor in ROS Enviroment.