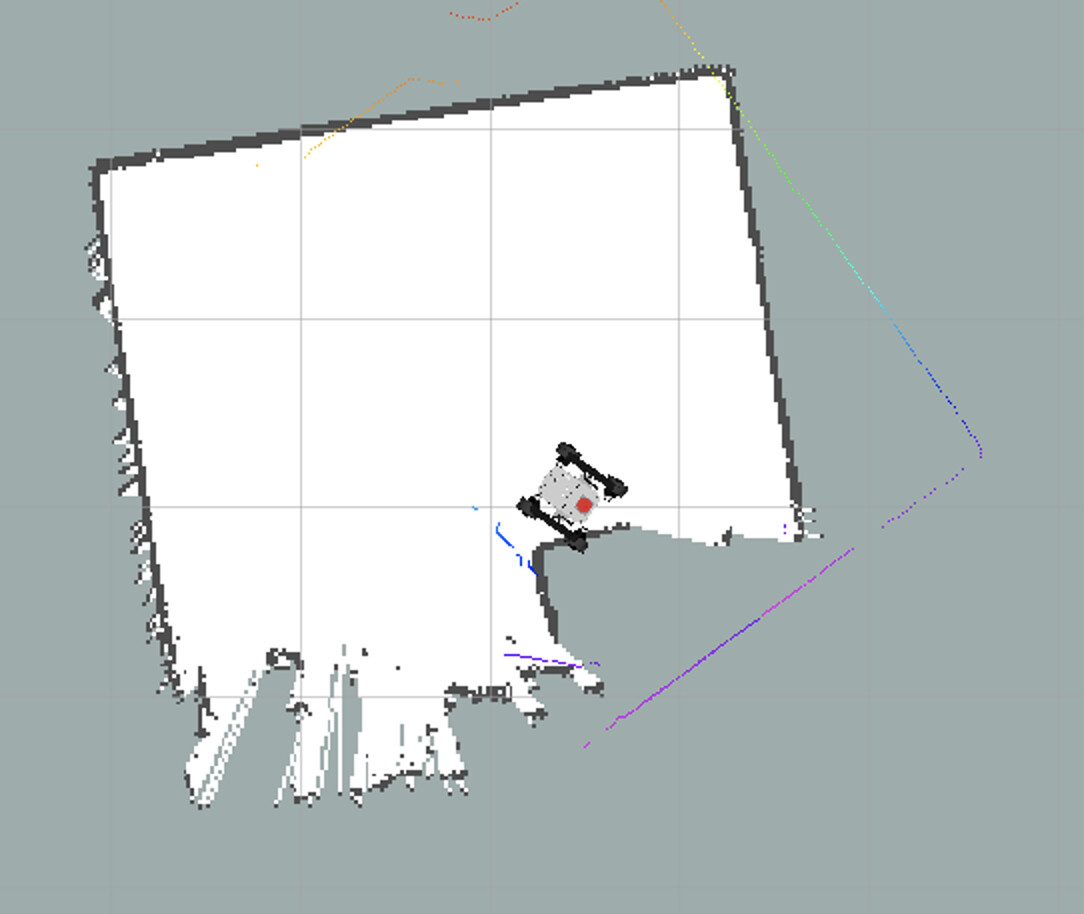
When robot rotates it created an error in where it thinks it is. Why?
Ideally I would like the robot to work like in your video examples where it rotates and map+prediction is very close.
Any config file I should change? Lidar speed? strength? IMU/ODOM covariance issues?